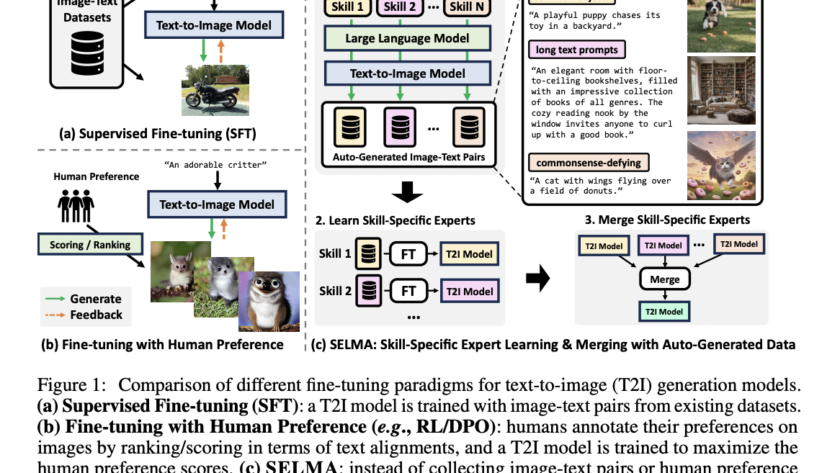
Text-to-image (T2I) models have seen rapid progress in recent years, allowing the generation of complex images based on natural language inputs. However, even state-of-the-art T2I models need help accurately capture and reflect all the semantics in given prompts, leading to images that may miss crucial details, such as multiple subjects or specific spatial relationships. For…
Read More